
Featured Projects
Pick and Place Pirate
Led the development of a robotic system to autonomously locate and cover magnetic objects under a sandpit using various sensors and custom analog circuitry. Coordinated with a multidisciplinary team to optimise hardware-software integration and improve system performance.
Full Stack Web Development
Built and deployed this website's front end and back end using VSCode, Django, SQLite3, Docker and Nginx on Linux. Integrated data storage and processing in Python/SQL, optimised SEO in HTML and developed UI in CSS/JS.

Apocalypse Rover
Developed a ground-based drone capable of navigating rough terrain up to a mile away. Equipped with custom actuators and sensors, it was designed to be controlled remotely, providing real-time video feedback. Collaborated closely with team members to optimise embedded systems, leading to a runner-up position in the embedded systems category (Bath Hack).

Robot Integration Costing Analysis
Performed a detailed costing analysis comparing cold rooms and mobile robotic arms with traditional dark store infrastructure, achieving significant cost, energy, and labor savings.
ROS2 Computer Vision Robot
Developed a ROS2-based robot with pose detection, object recognition, and autonomous navigation using OpenCV, YOLOv8, and LiDAR. Integrating SLAM and control algorithms to enable robotic movement in dynamic environments.

Wone (Watch Drone)
Lead a team of 2 in the design of a wearable drone that can fly around the user for aerial cinematography. Used custom toroidal propellers, accelerometers, and lightweight batteries for a compact yet functional prototype. We pitched the product to investors.
FPGA Computer w/ Pong
Developed a functional computer with a colleague from scratch using an FPGA programmed in SystemVerilog, culminating in a working version of Pong displayed on a VGA monitor. Took charge in implementing thorough test benches and optimised hardware design.
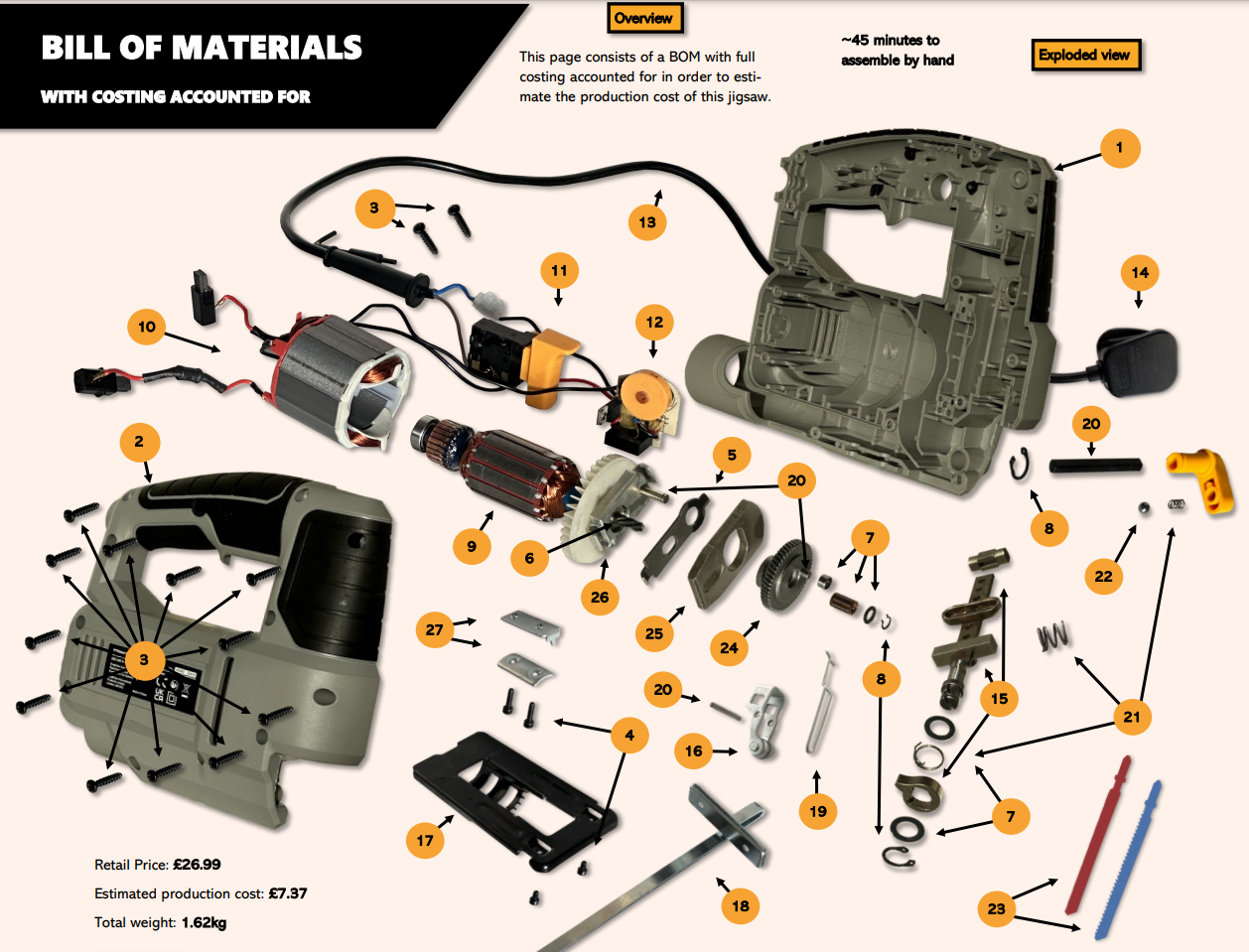
Reverse Engineering
Complete controlled disassembly of a jigsaw in order to create a detailed report on the user interaction and experience, the electromechanical mechanisms inside, manufacturing costs and techniques and a sustainability redesign.
Mars Explorer
Developed an autonomous Mars rover prototype in a team of 4 using OpenCV and Wi-Fi communication. Spearheaded software design with the usage of ArUco codes to localise vehicle and plan the device path based real-time visual inputs.
Robot Mouse
Worked in a team of 3 to create an automated vehicle that follows a 20m electromagnetic track in the fastest possible time. Implemented PID control and time optimisations using Arduino, with mechanical designs to enhance vehicle speed and stability. Fastest speed: 14s.
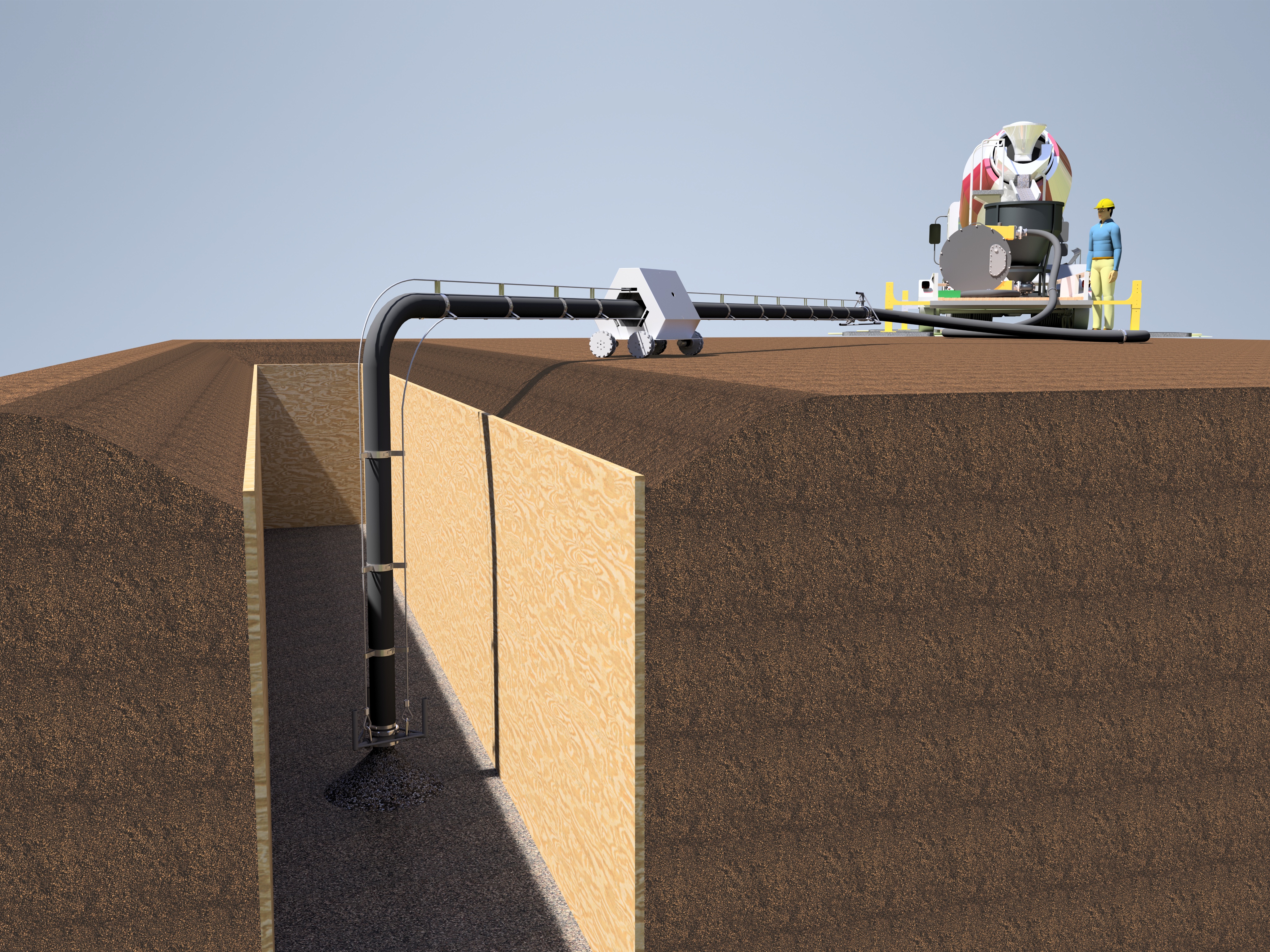
Anaconda
Worked in a diverse team in the conceptualisation and design of a revolutionary concrete delivery system utilising snake-arm robotics and peristalsis for optimal performance. Coordinated market research and FEA simulations using Nastran for material selection, fostering collaboration between engineering teams.

Software Business Analysis
An analysis of Vanilla Europa, a leading survival multiplayer Minecraft server, examining the server's revenue model, growth strategies, and key insights from 2018-2024 in collaboration with the owner.