
Project: Apocalypse Rover
This project involved the development of a rugged, ground-based drone capable of navigating challenging terrain up to a mile away. Designed for post-apocalyptic conditions, the rover was equipped with custom actuators and advanced sensors for remote control, providing real-time video feedback to operators. The project was a finalist in the Embedded Systems category at Bath Hack 2022, showcasing its innovative design and functionality.
 |
 |
Project Description
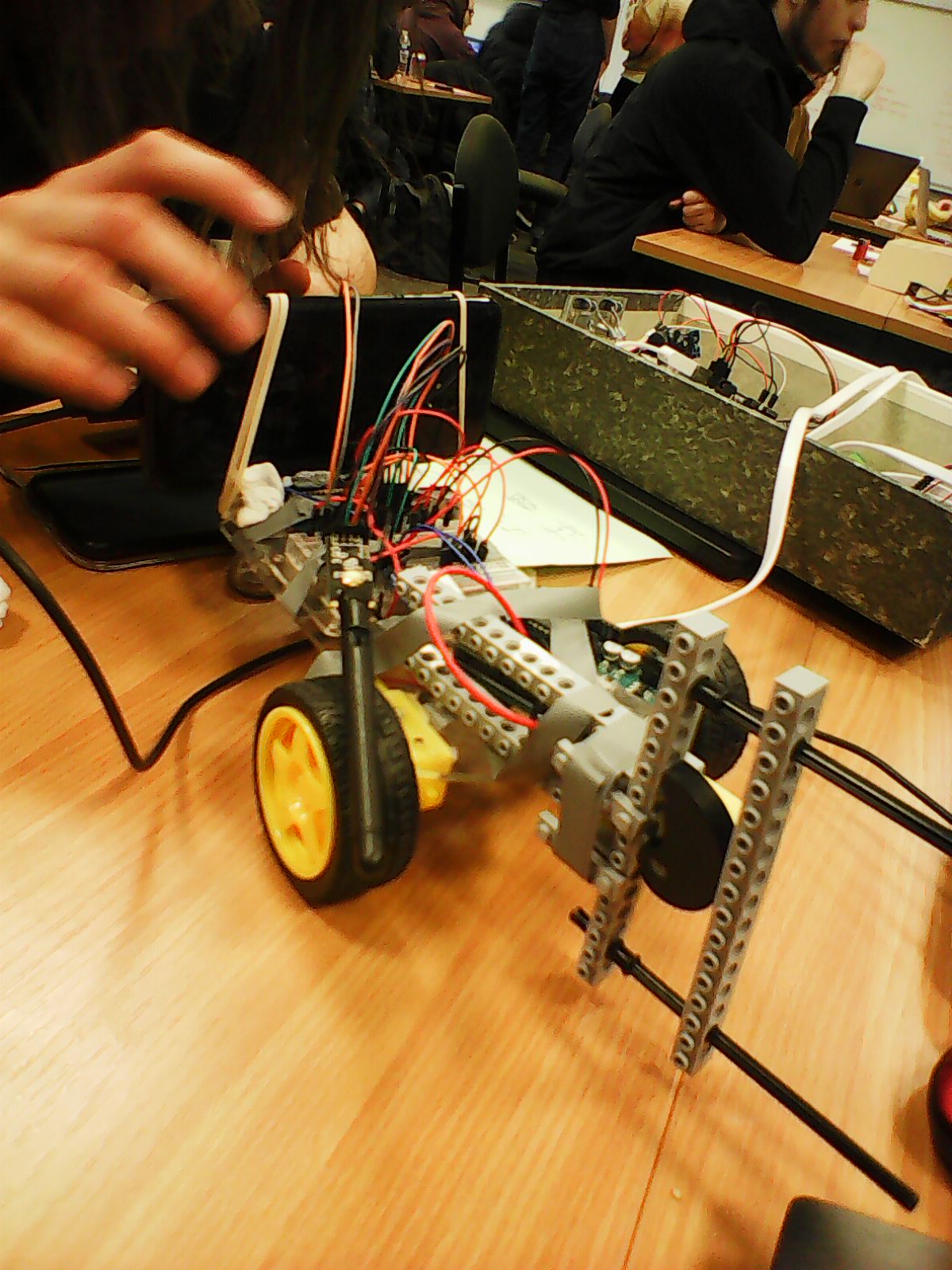
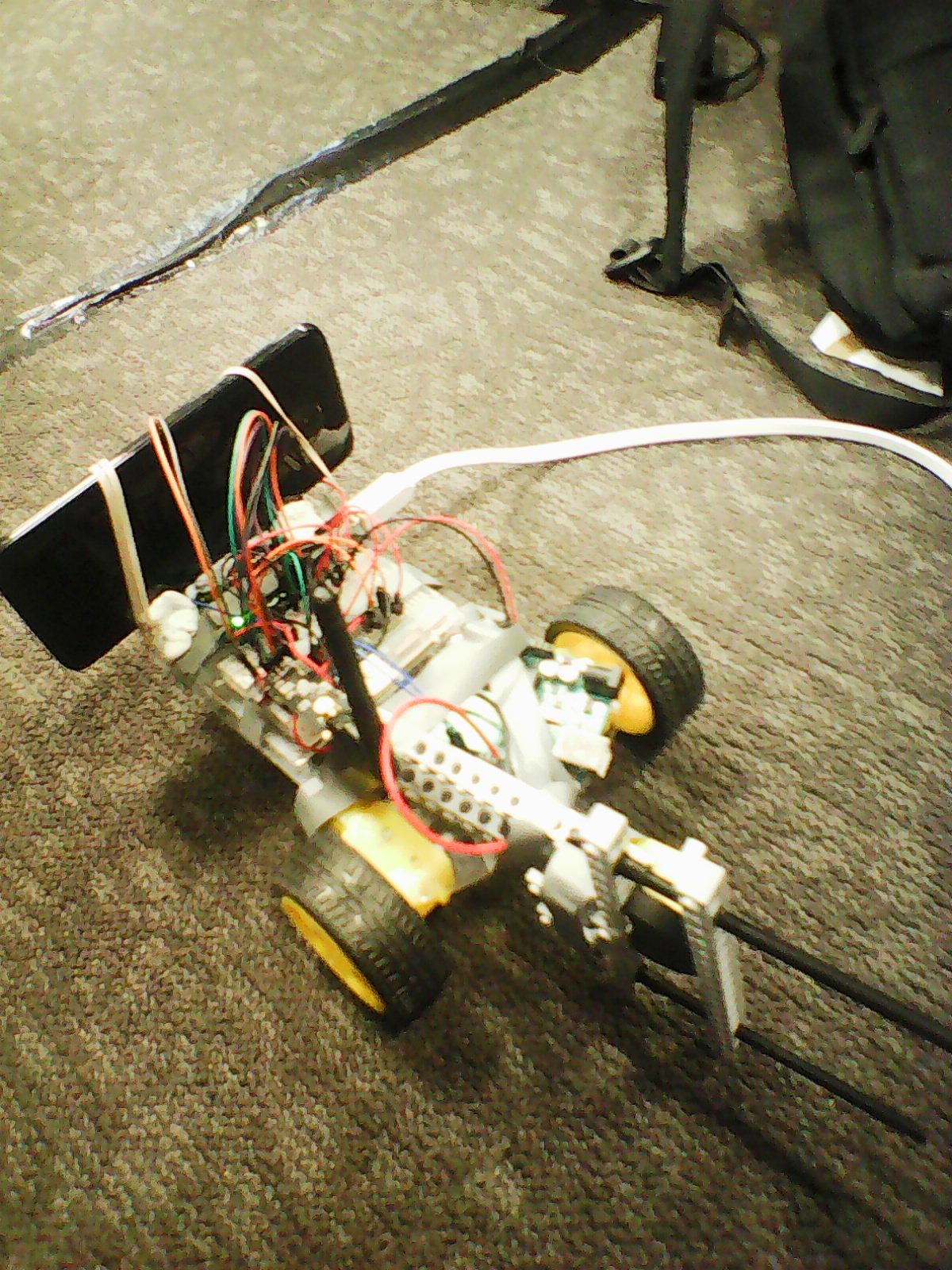
As part of the Bath Hack 2022 competition, the Apocalypse Rover was designed to tackle extreme environments. My role centered on mechanical engineering, with a focus on creating a durable chassis capable of withstanding both internal stresses from the powertrain and external forces from the environment. The rover featured a servo-operated grabber jaw, allowing it to interact with objects in its surroundings, and was controlled via radio, enabling remote operation from up to a mile away.
The electronics were housed in a protective casing specifically designed for rough terrain. Through rigorous system testing, I ensured the vehicle’s functionality in post-apocalyptic-like conditions, and the project was well-received by potential investors. Ultimately, we were named runners-up in the Embedded Systems category, a testament to the innovative design and functionality of the rover.
Key Features
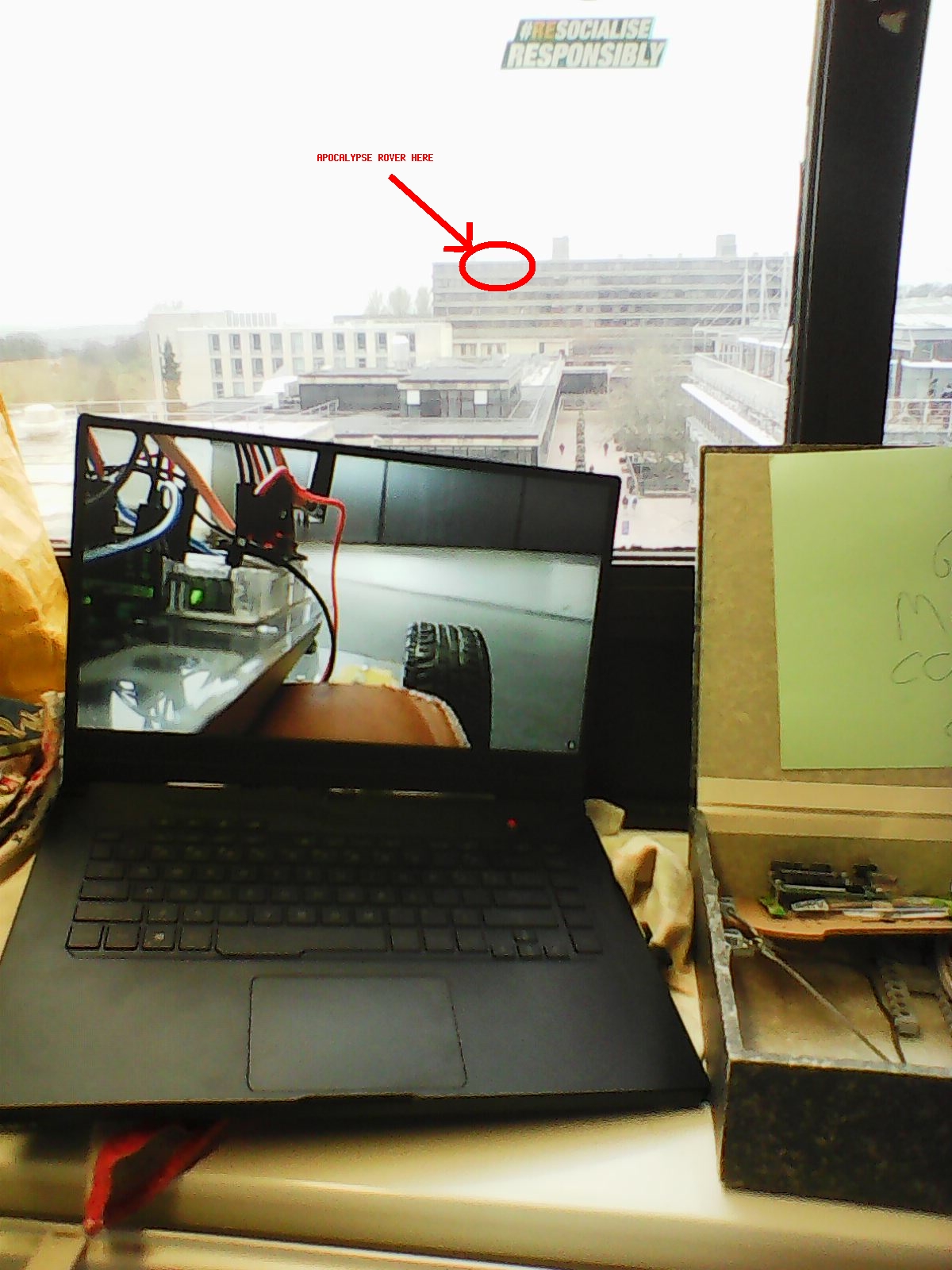
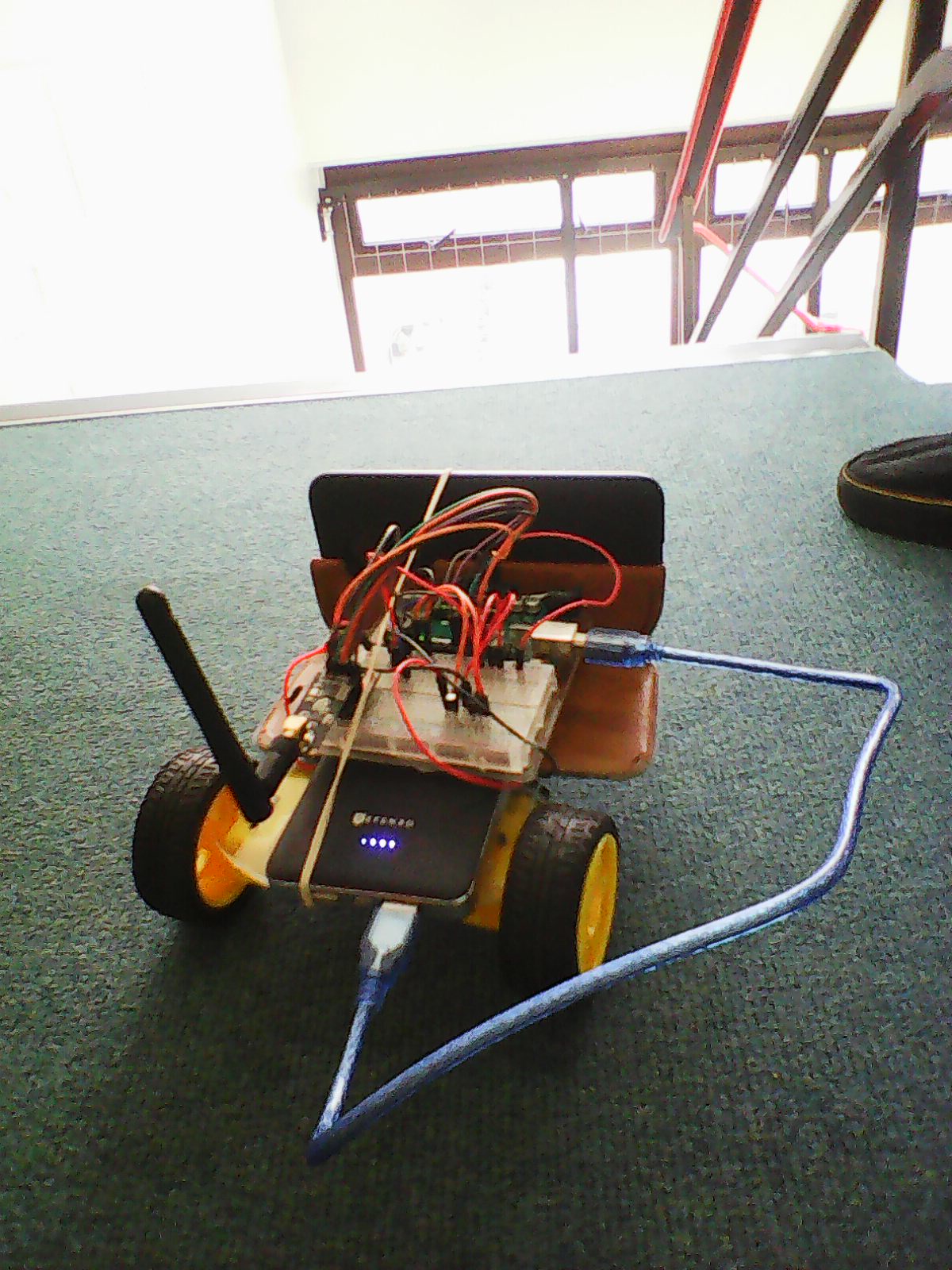
- Remote Control with Real-Time Feedback: The rover was designed to be operated from a distance of up to a mile, providing real-time video feedback to the user.
- Rugged Chassis: The chassis was custom-built to withstand extreme terrain and protect the internal electronics from environmental hazards.
- Custom Actuators: Equipped with custom-built actuators to control the servo-operated grabber jaw, allowing the rover to interact with objects in its environment.
- Sensor Fusion: The integration of various sensors provided comprehensive data for navigation and remote operation in challenging conditions.
- Radio Control: The rover’s movement and actions were controlled via radio, ensuring seamless long-distance operation.
Technologies Used
The following technologies and tools were utilised to develop the Apocalypse Rover:
- C++: Used for programming the rover’s control system, including the servo-operated grabber jaw.
- Radio Control: Implemented for long-distance remote operation, ensuring reliable control over the rover.
- Custom Actuators: Developed for precise control of the rover’s interactive elements, such as the grabber jaw.
- Sensor Fusion: Integrated various sensors to enhance navigation and environmental interaction.
- Chassis Design: Designed a durable, protective housing for the rover’s electronics, ensuring safe operation in harsh environments.
Project Gallery
These images show the range of the Grone device. The first image shows the device being controlled from Norwood house, and the other images are taken from Wessex house, 2 blocks of flats directly opposite to each other. The device was even tested on the Weston-super-Mare beach for the full mile of control.

Further detail
Here you can visist the DevPost page we made at the time, alas many of the comments were made to be tongue-in-cheek as we were having a lot of fun making this: