
Project: Pick and Place Pirate
The Pick and Place Pirate project involved the design and implementation of an autonomous gantry robot capable of detecting magnets hidden under sand and placing plastic cups over them in under 60 seconds without external control. I served as the lead electrical engineer in a small team, responsible for the development of custom hardware and software to enable precise magnet detection and robot control. This project demonstrated expertise in sensor fusion, analog signal processing, and detailed circuit design, culminating in a high-performance, compact solution.

Project Description
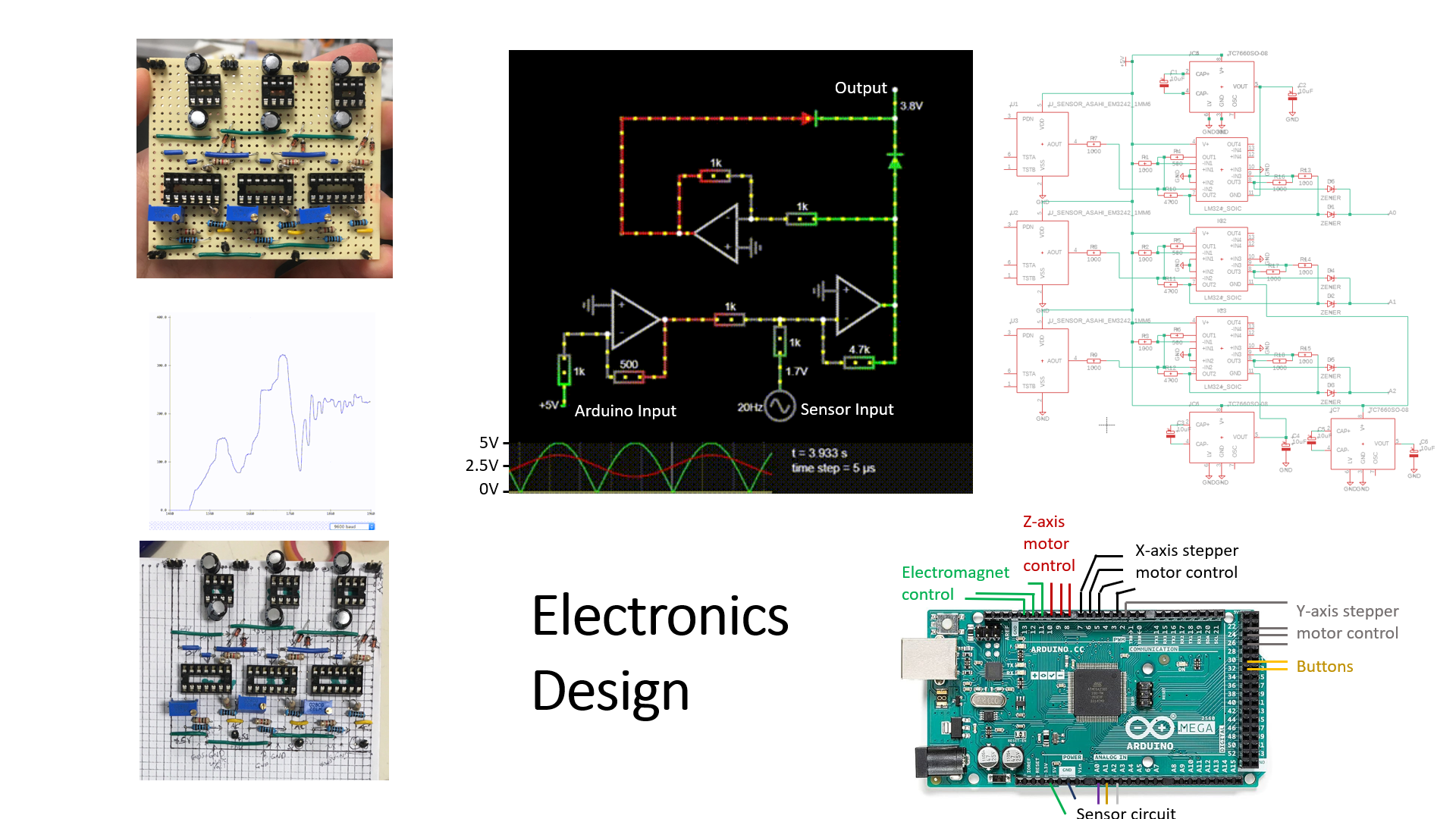
The Pick and Place Pirate is an autonomous robot designed to sense magnetic "treasure" buried under sand and accurately place cups over these locations. The project featured a gantry system that navigates across a sand bed to create a heatmap using Hall-effect sensors. These sensors detect the presence of magnets, enabling the robot to pinpoint their locations. As the lead electrical engineer, I designed circuits utilising Hall-effect sensors, quad op-amps, and charge pumps to amplify and process the sensor signals. Additionally, I ensured seamless integration between the electrical, mechanical, and software components of the system, including the use of MATLAB to generate heatmaps and control the robot’s operations.
Key Features
- Magnet Detection and Heatmapping: Developed custom circuitry using Hall-effect sensors and op-amps to detect buried magnets and create heatmaps for accurate pick and place operations.
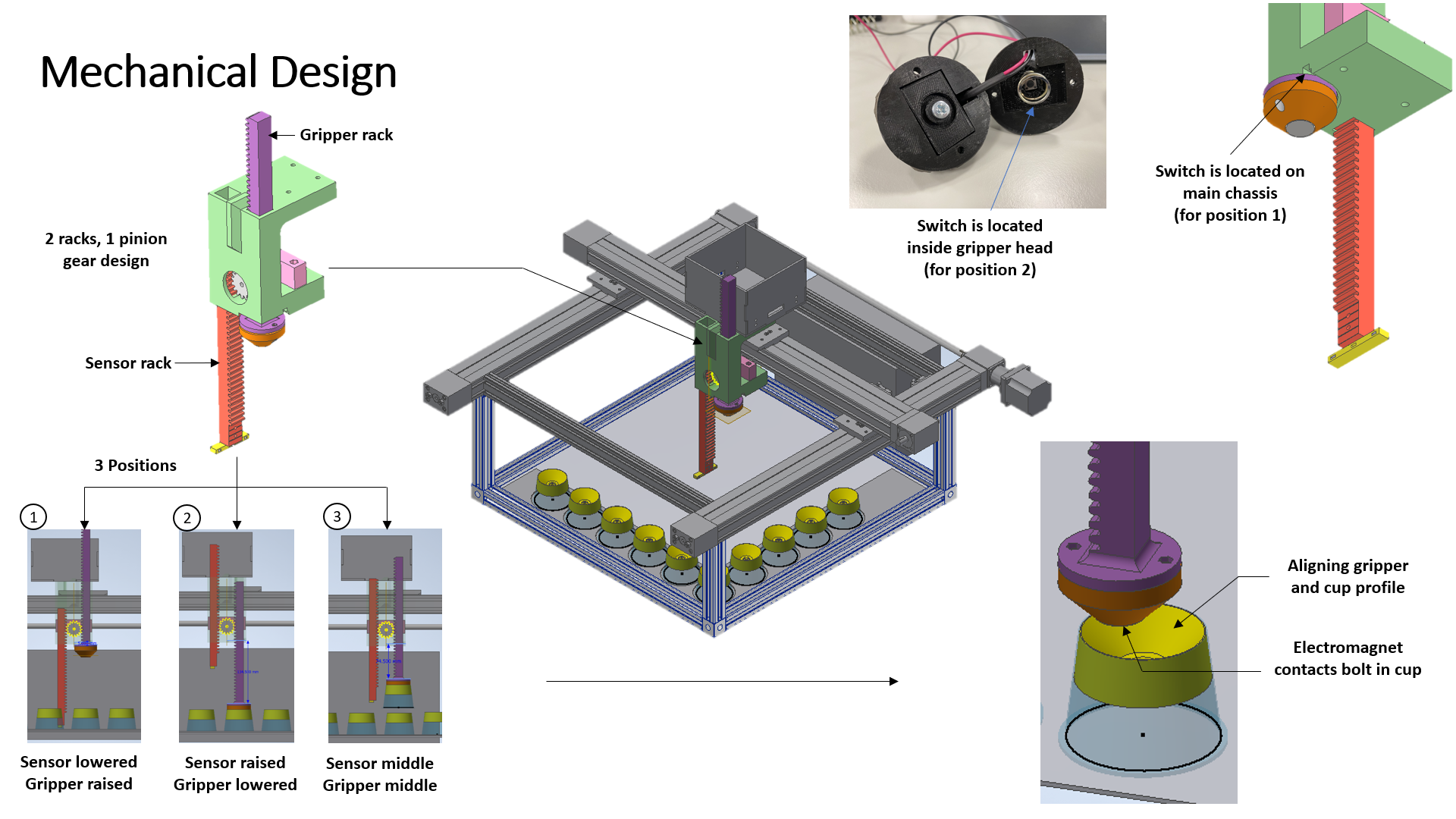
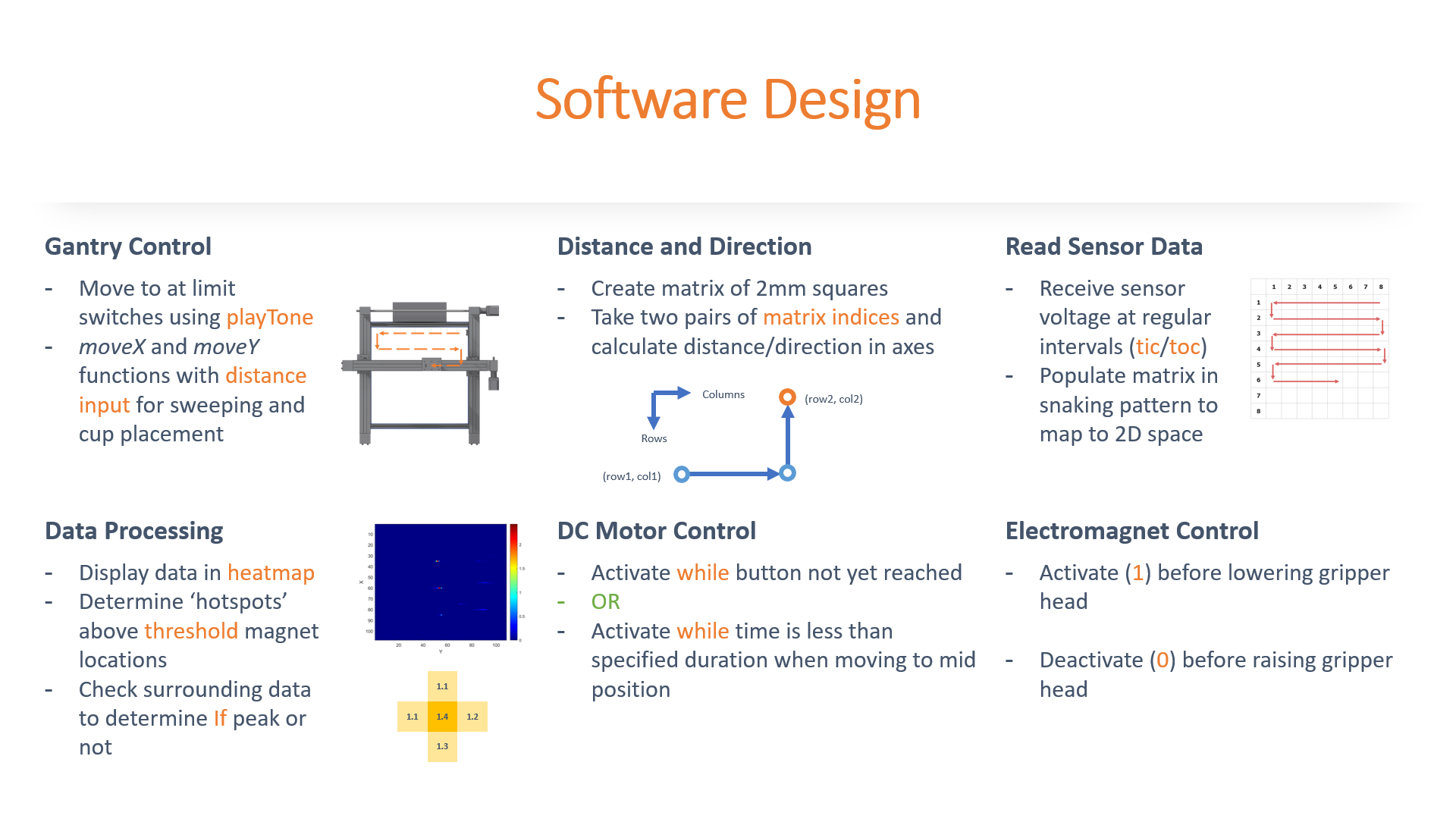
- Autonomous Gantry System: Designed the robot to autonomously navigate over the sand bed and accurately place cups over detected magnets using a MATLAB-controlled gantry.
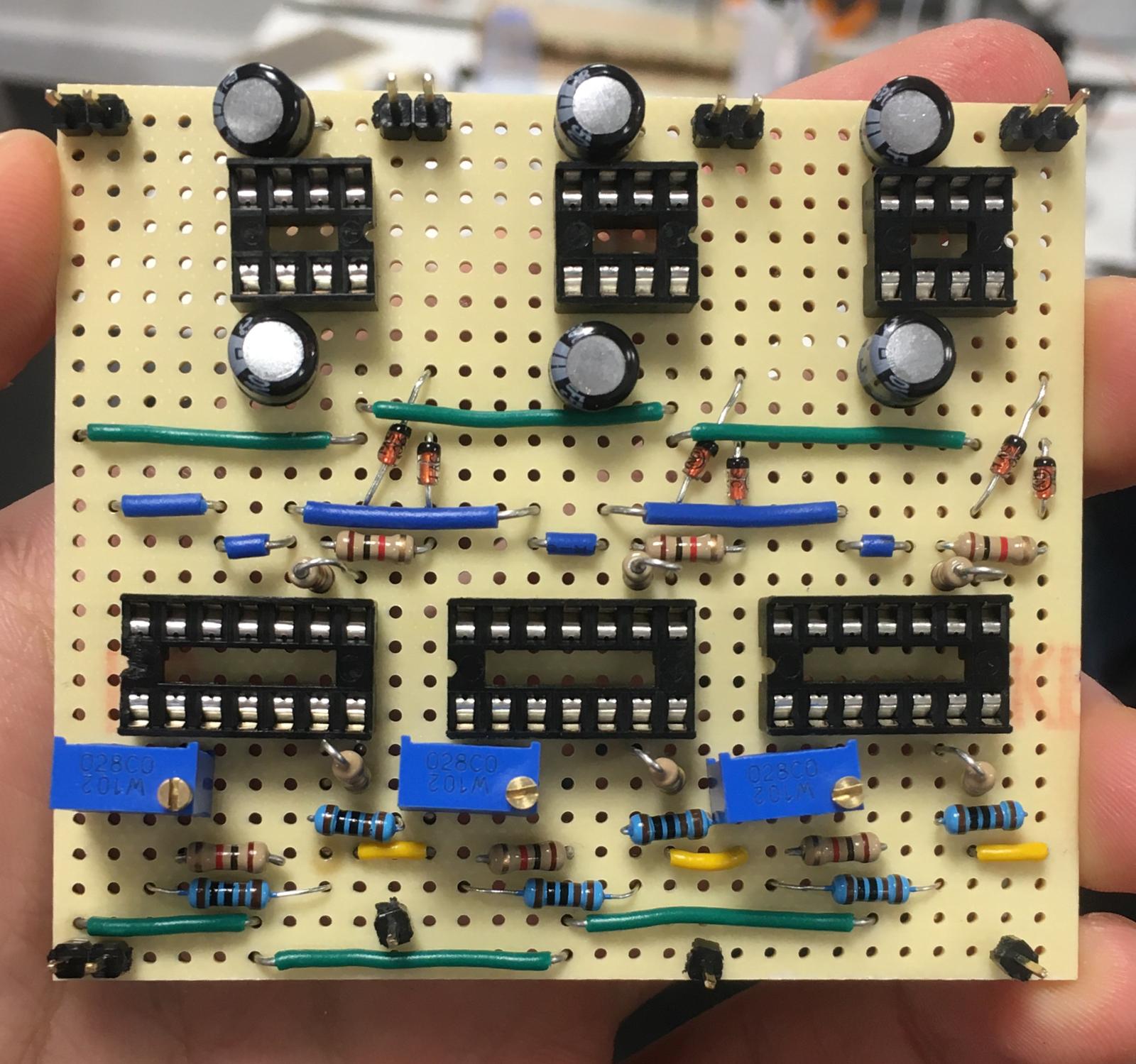
- Compact Circuit Design: Created the smallest possible circuit, utilising custom-designed hardware with strict spatial constraints, ensuring no thermal management issues while maintaining functionality.
- Seamless System Integration: Worked closely with the software and mechanical engineers to optimise the electrical components and their integration with the overall system, allowing for real-time processing of sensor data and control of motors and actuators.
Technologies Used
The following technologies and tools were used to bring this project to life:
- Arduino Mega2560: Main microcontroller used to control the system, chosen for its versatility and processing capabilities.
- Hall-effect Sensors: Used to detect the magnetic field generated by hidden magnets beneath the sand, providing the data necessary for heatmapping.
- Quad Op-Amps: Essential for amplifying the Hall-sensor signals, ensuring accurate detection and processing of magnetic fields.
- MATLAB: Software used to process sensor data, generate heatmaps, and control the gantry system, enabling autonomous robot functionality.
- Charge Pumps: Employed in the circuitry for efficient voltage inversion, powering the components responsible for detecting magnetic fields.
- Electromagnets and Motors: Integrated into the system to enable precise pick and place actions, ensuring the robot could collect and place cups over detected magnets with high accuracy.
Project Gallery
Here are some images showcasing the various aspects of the Pick and Place Pirate project:
Project Demonstration
Watch the videos below for a live demonstration of the Pick and Place Pirate scanning and then placing:
Full Technical Report
Below are 3 pdfs for further information on the project: